






 location:
location:
精确测定激光光束的传播特性及束腰位置至关重要——但其中充满挑战。
作者:Sneha Patil
M² 参数在整个光子学行业中用于规范激光光束质量——至少对于具有近高斯输出轮廓的激光器是如此。对于激光制造商而言,精确测量 M² 对于验证产品性能和确保生产一致性至关重要。由于 M² 直接影响激光与工艺的相互作用方式,最终用户也需要可靠的 M² 测量来维持性能、确保正确集成,并支持长期工艺稳定性。
由于光束质量会随时间漂移,该参数不仅影响重大,而且具有动态性。环境条件、对准偏移和系统老化都是可能影响光束质量,进而影响 M² 的因素。这意味着,除了了解 M² 的定义之外,产品开发者、制造商和系统终端用户都能通过理解 M² 为何是至关重要的参数,来优化众多工艺。
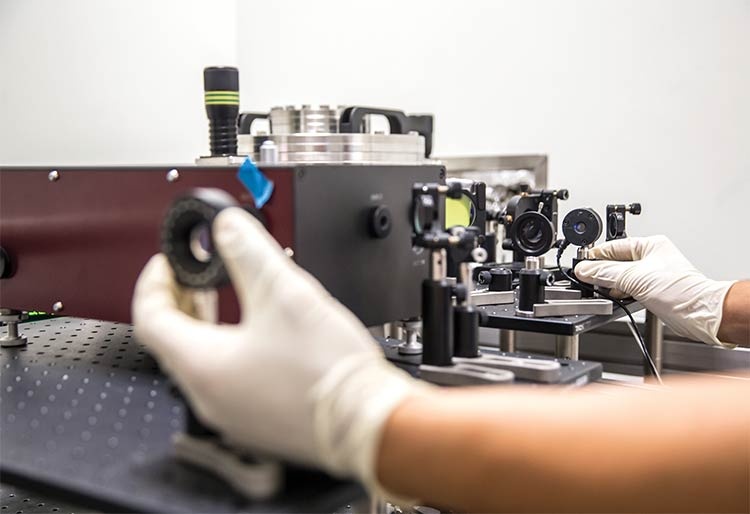
图1 *图片来源:iStock.com/CasarsaGuru*
测量 M² 和束腰位置所面临的挑战——尤其是对于长瑞利长度激光器——尤为关键。这类光束非常重要,测量中的微小误差会显著影响系统对准、工艺精度和整体性能。
1、定义 M²
M² 定义为真实激光束的光束参数乘积(光束半径 × 光束发散半角)与完美 TEM00 基模高斯光束的光束参数乘积之比。对于理想高斯光束,M² = 1。对于非径向对称光束,M² 需沿 x 轴和 y 轴分别计算。
国际标准 ISO 11146 中提供的 M² 公式基于 D4σ 光束宽度。其定义为光束沿该轴向的边缘强度分布的四倍均方根标准差 (σ )。具体而言,ISO 11146 将 M² 定义为:
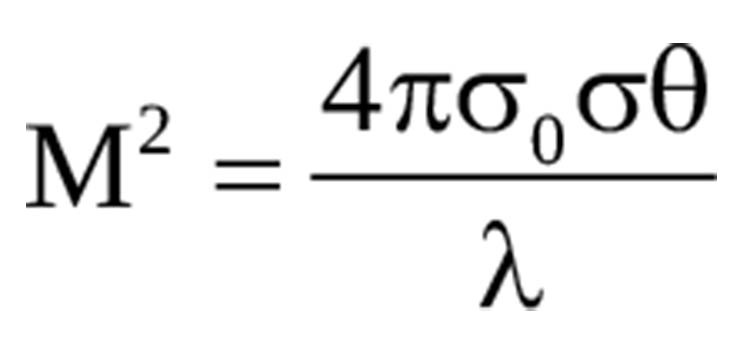
其中:
• σ ₀ 是束腰处的二阶矩光束半径,即光束横截面强度分布的标准差。
• σθ 是二阶矩半角发散角,即光束角度扩展的标准差,通常在远场测量。
• λ 是激光波长。
(图2)
2、M² 测量因素、方法与参数
使用 D4σ 光束宽度来定义 M² 的优势在于,它能得出一个高度通用的结果,适用于几乎所有光束类型,包括非对称、多模、畸变和平顶光束。相比之下,常用的高斯光束宽度(定义为强度降至峰值 1/e² 处的直径)在不同光束轮廓上的适用性则没有那么广泛。
然而,对于完美高斯光束,1/e² 光束半径和发散角正好是二阶矩值的 √2 倍。如果将
σ ₀ = ω₀/√2 和 σ θ = θ/√2 代入前述公式,则得到更简单且更广泛使用的形式:
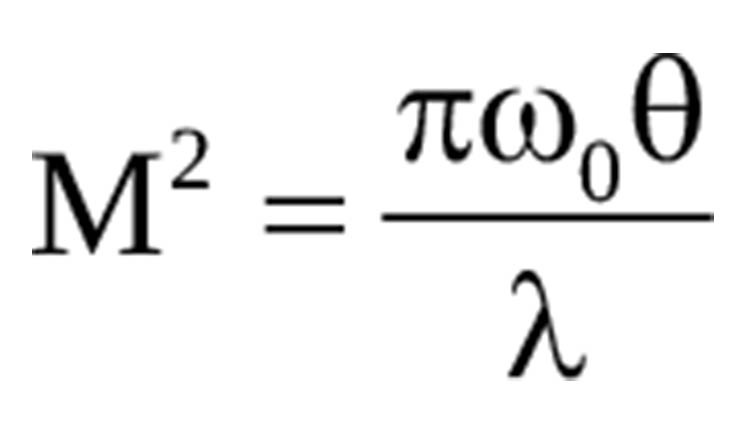
其中:
• ω₀ 是光束束腰半径(在 1/e² 强度点处)。
• θ 是远场半角发散角(在 1/e² 强度点处)。
• λ 是激光波长。
这个简化公式适用于理想或近理想光束,即任何单模(相对较低的 M²)、径向对称和/或无明显像散的光束。然而,任何设计用于测量 M² 的仪器都必须使用通用的 ISO 公式,以保持准确性并完全符合标准。
此外,M² 是一个无量纲的比例因子,适用于多个光束参数——束腰尺寸、远场发散角和瑞利长度。例如,M² = 2 的激光器,其束腰尺寸和发散角将是完美高斯光束的两倍,瑞利长度则是完美光束的四分之一 (1/2²)。
这种计算上的简洁性是 M² 如此有价值且被广泛使用的原因之一。M² 也很强大:它描述了光束通过焦点的完整空间演化特性,并可用于量化非径向对称光束中的不对称性和像散。
3、M² 的应用
由于 M² 提供了激光光束传播特性的全面视图,它已成为从事研发和生产的激光制造商不可或缺的度量标准。它能够验证激光器是否符合设计规范、保持单元间的一致性,并在真实条件下可靠运行。对于最终用户而言,精确的 M² 数据有助于改进工艺集成、帮助维持质量控制,并辅助排查性能问题。其价值遍及众多行业,如精密制造、医疗设备、航空航天和科研领域。
至关重要的是,M² 测量提供的不仅仅是一个单一的质量因子。它还能得出相关的光束参数(如发散角、束腰尺寸和束腰位置)。一个完整且精确的 M² 测量将描述光束能被聚焦得多好,并指示实际焦点所在位置。
对于许多系统,尤其是那些使用紧密聚焦或长瑞利长度光束的系统,束腰位置的微小误差会对工艺精度、能量传递和对准产生显著影响。即使 M² 的微小偏差或束腰位置的误判,都可能导致焦点光斑质量、传输功率密度和系统效率的巨大差异。随着激光应用向更高精度和更高功率发展,对精确光束质量表征的需求变得愈发关键。
4、测量 M²
ISO 11146 标准提供了进行合规 M² 测量的具体指导。其中特别指出,必须沿光束传播轴在至少 11 个不同位置对光束的强度分布进行采样。其中至少 5 个采样点必须在距离束腰位置一个瑞利长度之内获取,另外至少 5 个采样点必须在距离束腰位置两倍瑞利长度之外获取。
在沿传播轴完成 11 个(或更多)位置的光束宽度测量后,ISO 11146 规定必须将这些点拟合到基于高斯光学的双曲线传播方程。遵循这些规定的每一步,就能得到每条轴向上可追溯、符合标准的 M² 测量值,以及束腰尺寸和位置的值。
有多家制造商开发和销售用于测量 M² 的解决方案。这些商用仪器形式多样,但几乎所有都采用三种基本测量方法之一:移动光学器件、波前传感和/或刀口或狭缝扫描。
移动光学系统通常使用聚焦透镜在仪器内产生束腰,然后让相机平移通过光束聚焦区域。相机直接成像光束尺寸如何沿其传播轴演化。这些系统在多个位置收集光束轮廓数据,然后根据 ISO 11146 计算 M² 和其他参数。
在几乎所有基于移动光学的商用 M² 仪器中,光路都在仪器内部被折叠。这使得整个系统保持紧凑,同时仍能在大轴向距离上对光束进行采样。例如,在 Ophir BeamSquared M² 光束传播分析仪中,相机保持固定,而移动多个反射镜来改变聚焦透镜和相机之间的路径长度。
波前传感技术,如 Shack-Hartmann 传感器,通过测量激光光束的相位前进来推断光束质量,而不是直接观察其空间传播。在这些系统中,微透镜阵列将入射光束分割成多个更小的子波。它们提供了相对于参考平面的局部倾斜测量值,然后通过波前重建模型估算出 M² 和相关参数。
这种方法的主要优点是速度快且结构紧凑。主要缺点是它提供的是对 M² 的间接估算,并且它不是符合 ISO 标准的技术。
刀口法和狭缝扫描法通过在光束上物理扫描一个狭窄的边缘或狭缝,并记录透射功率来测量光束尺寸。在光束束腰周围的多个轴向位置重复此测量,可以确定每个位置的光束宽度,然后拟合到传播曲线上以得出 M²。Ophir NanoScan 就是狭缝扫描式激光光束轮廓分析仪的典型例子。
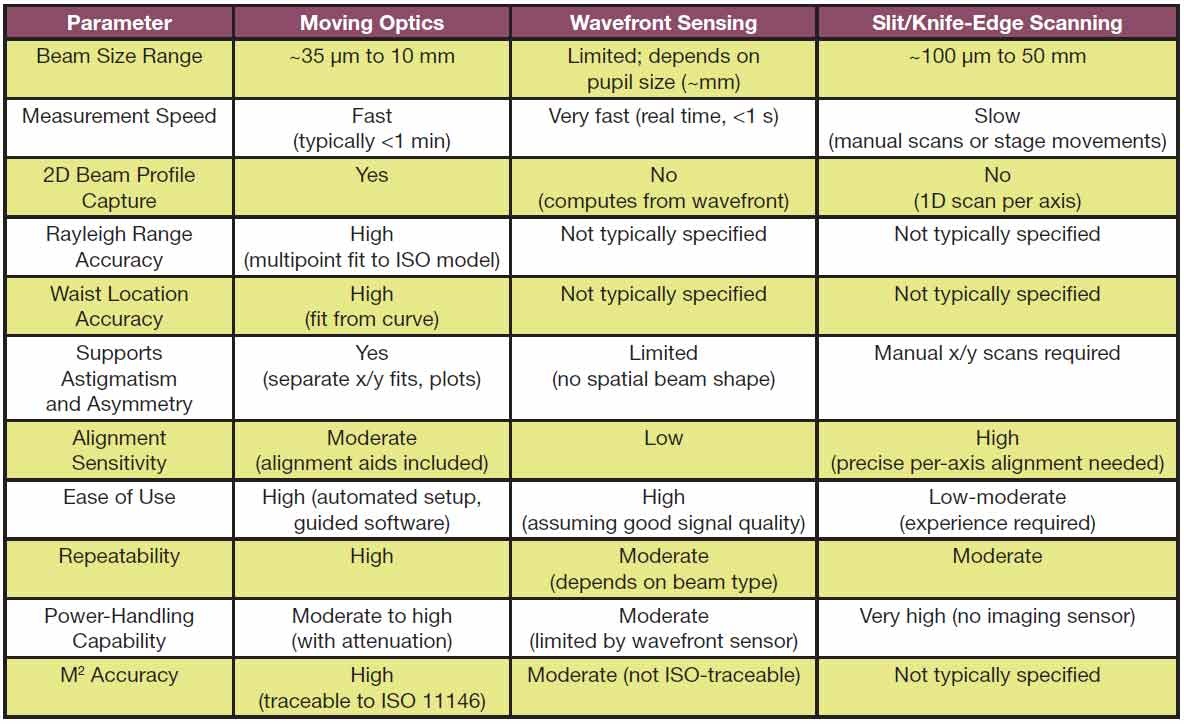
这些方法各有其特定的能力和缺点;表格" M² 测量因素、方法与参数" 提供了每种方法性能和实际特性的概览对比。最有用的见解或许是,某些仪器类型通常不包含针对瑞利长度或束腰位置的测量精度规格。这通常表明该测量方法对这些参数的控制不足以保证性能,尽管它也可能意味着精度会随设置和用户技术而有很大差异。
5、测量长瑞利长度光束
长瑞利长度光束常见于用于高精度应用(如微细加工、半导体光刻和眼科手术)的先进激光系统中。通常,它们具有大直径和非常低的发散角,这使得它们非常适合紧密聚焦和长工作距离。
然而,正是这些特性给精确的 M² 测量带来了挑战。由于光束的焦散曲线随距离变化缓慢,要检测光束宽度的细微变化并定位真正的束腰,需要高空间分辨率、低噪声和极其精确的校准。
但测量长瑞利长度光束的 M² 对于必须验证出射光束质量的激光制造商,以及必须验证性能并确保工艺稳定性的最终用户来说,至关重要。
在现有技术中,移动光学系统提供了最稳健的解决方案。它们测量完整的传播轮廓,使系统能够提取精确的 M² 值,即使对于瑞利长度超过 10 米甚至 20 米的光束也是如此。相比之下,波前传感器并不适合这些测量。尽管它们速度快且结构紧凑,但这些仪器通过分析光学相位前的曲率来间接推断 M²。对于长瑞利长度光束,相位曲率平缓且难以分辨。这导致灵敏度低且准确性差,尤其是对于近准直光束。此外,这些系统无法提供对束腰位置或发散不对称性的洞察。
刀口和狭缝扫描系统在这种条件下也很吃力;在长行程范围内一次测量一个轴向的光束尺寸,会引入漂移、不对中和机械不稳定的风险。虽然从技术上讲它们可用于收集 M² 数据,尤其是在不适合使用基于相机的系统的环境中,但它们的一维特性和对运动的敏感性使其成为低发散度、高保真度光束测量的糟糕选择。
6、提高测量精度
移动光学系统是测量长瑞利长度光束 M² 的最有能力解决方案。然而,获得高质量结果并非自动实现。要使用这些系统获得精确测量,需要关注多个潜在的误差源——无论是光学还是计算方面的。Ophir BeamSquared SP204S-PRO 系统的演进展示了制造商如何不断改进其仪器,以克服测量长瑞利长度光束时遇到的实际挑战。这项工作的一个关键方面是持续改进系统中几乎每个组件的光学质量,包括衰减滤波器和聚焦透镜。同时,还需要改进透镜校准和安装,以避免机械变形,并为波前误差引入稳健的内部质量检查。
此外,光束的任何畸变,尤其是在反射镜处的畸变,在更短的波长下会变得更加明显。例如,在 532nm 处引入 λ/10 波前误差的反射镜,在 355nm 处将产生 λ/6.7 的波前误差。此外,聚焦透镜的焦距会随波长减小而减小,因为透镜材料的折射率增加。这导致光束在束腰处被更紧密地聚焦,使得仪器对不对称性和像散更加敏感。使用紫外激光测试每个单元以验证系统精度,可以抵消这种不可避免的偏移。MKS 还改进了系统的内部计算算法,以考虑仪器中任何已知误差。这减少了单元间的差异,确保 M²、光束像散和束腰位置的结果一致且可重复,通常误差在 5% 以内。
虽然产品制造商必须针对各个参数调整其解决方案,但所有组件作为一个集成系统协同工作同样重要。为了使用移动光学方法进行有效分析,相机需要识别正在使用的透镜,并且校准与该特定组合相关联,以确保可追溯性和可重复性。硬件和软件之间的这种紧密集成是消除测量长瑞利长度光束时可能出现的细微误差源的关键。对商用系统的这些持续改进,正为那些必须使用长瑞利长度光束的应用带来最佳结果。例如,BeamSquared SP204S-PRO 系统现在支持对瑞利长度高达 40 米的激光器进行 M² 表征。
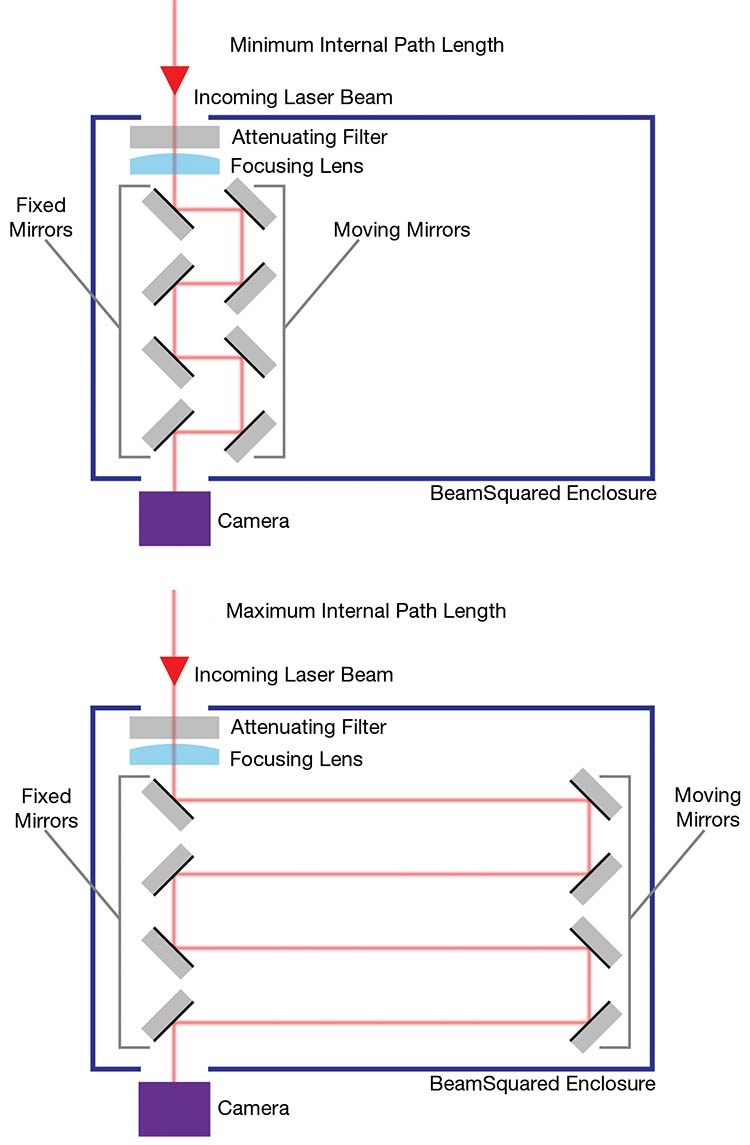
*图 3. 一系列可移动反射镜使得 BeamSquared 内部的光学路径长度能够在约 800 毫米范围内变化,同时保持整体仪器紧凑。束腰位置精度的提高(高达 200%)如今使用户能够在从紫外到近红外的光谱范围内以更高的空间分辨率精确定位光束焦点。这种精度水平对于对准关键性任务以及束腰必须落在狭窄公差窗口内的光学系统中的诊断测量非常有价值。图片来源:MKS Ophir.*
与此同时,技术开发者正在利用精心优化的光学器件和校准程序,在像散测量方面取得重大进展。这些进步确保即使光束形状的细微畸变也能被检测和处理。BeamSquared SP204S-PRO 解决方案现在即使在复杂或非对称轮廓的光束中,也能实现优于 3% 的像散测量精度。
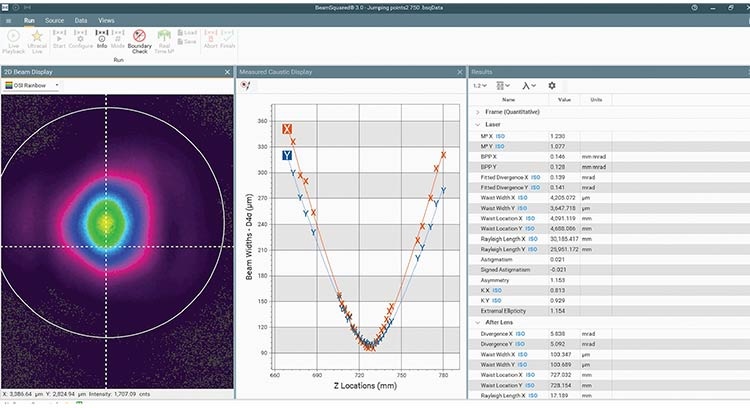
*图 4. BeamSquared SP204S-PRO 的测量显示界面。图片来源:MKS Ophir.*
7、未来展望
随着激光应用对更高精度和更严格公差的要求不断提高,稳健的光束表征方法的重要性只会与日俱增。现在比以往任何时候都更需要精确测量 M² 和光束束腰参数,以确保现代激光系统(尤其是那些具有长瑞利长度的系统)的性能和可靠性。尽管像 ISO 11146 这样的标准提供了清晰的框架,但要真正实现精确、可重复的结果,需要仔细关注测量技术、系统设计和校准。
幸运的是,产品化方面的进步,加上对 M² 参数理解的深入,使得整个光子学价值链上的专业人士都能够取得更好的成果。
*发布时间:2026 年 5 月